Sugarscape
- author:
Alan G. Isaac
- organization:
American University
- date:
2024-06-03
This |chapter| presents a simple version of the famous Sugarscape model of [Epstein.Axtell-1996-MIT]. This model comprises a terrain on which a population of agents resides. [Kendrick.Mercado.Amman-2006-PrincetonUP] suggest thinking of the terrain as comprising the possible locations for small businesses, where business profitability is location dependent. Under this interpretation, an agent chooses a location for the production of profits, where the of profit potential varies by location. To spice things up, agents continually seek better locations, but only one agent at a time can occupy any particular location. In addition, agents have resource needs, and if an agent cannot meet its needs it will go bankrupt and exit the terrain.
The Sugarscape model is considered to be a paradigm of the “generative approach” to social science [Epstein-1999-Complexity]. Mobile autonomous agents compete for resources, and outcomes such as average survival rate or inequality emerge in the process. The outcomes are generated, not imposed.
Model Basics
Terrain
The Sugarscape model has a spatial dimension, captured by the two-dimensional terrain. The classic Sugarscape terrain comprises a two-dimensional rectangular grid of patches.
Resources
The simplest version has a single resource, called sugar, that is unequally distributed across the terrain. The terrain and its initial sugar distribution is often called the sugarscape. The distribution of sugar is not simply random but instead has areas of greater concentration.
Patches
A terrain is a collection of patches.
Each location on the terrain is a single patch (also called a cell).
This location is designated by ordinary Cartesian coordinates,
and these coordinates may be considered to be an immutable attribute of a patch.
Patches are associated with the renewable resource in the following ways.
An immutable characteristic of a patch is its sugar capacity (maxsugar).
Since sugar capacity differs between patches,
they are fundamentally heterogeneous.
In addition, a patch’s actual amount of sugar (sugar)
may differ from its capacity.
This is another source of heterogeneity.
Patch Behavior
There is one patch behavior: regenerating the renewable resource whenver it is below capacity. In the Sugarscape model, this behavior is captured by a single growback rule that governs the entire terrain. This chapter focuses on the discrete growback rule of [Epstein.Axtell-1996-MIT]. This characterizes growback as follows.
Here \(\alpha\) is the maximum amount of sugar that a patch might be able
to grow back in one period.
This is a model parameter that applies to the entire terrain.
The parameter \(s_\max\) receives the patch-specific carrying capacity (maxsugar),
and the parameter \(s\) receives the current resource level of the patch (sugar).
So a patch can regrow sugar at a terrain-specific rate,
but only up to its maximum capacity.
(In the canonical Sugarscape model,
the capacity of each patch—its maxsugar—lies
in the integer interval \([0\,..\,4]\).)
- immutable attributes:
location
maxsugar(sugar capacity)
- mutable attributes:
sugar
Terrain Specifics
The terrain is a two-dimensional rectangular array of patches, which are assigned adjacent integer coordinates.
- immutable attributes:
dimensions (number of rows and columns)
\(\alpha\) (growback rate)
Canonical Terrain
The canonical Sugarscape terrain is a \(50 \times 50\)
grid of patches.
Each patch has a sugar capacity (maxsugar)
that lies in the integer interval \([0\,..\,4]\).
Correspondingly, the actual sugar (sugar) of any patch
must fall in this interval.
Sugar capacity is clustered. Unfortunately, the original [Epstein.Axtell-1996-MIT] presentation describes the terrain verbally rather than algorithmically. There are two peaks (with sugar capacity 4), separated by a valley, and surrounded by a “desert” of sugarless patches. An image accompanies this description, and various replication efforts have attempted to extract data from this image. This |chapter| works with the sugar data provided in the NetLogo Models Library, which is very similar but not identical to the original terrain. [1]
Initialization of the Terrain
Intialization of the terrain first sets
the value of maxsugar and then sugar for each patch.
Take the values of maxsugar,
sequentially from the sugar-map.txt file,
which has the same \(50 \times 50\) layout as the terrain.
Note that the value of maxsugar is in integer interval \([0\,..\,4]\).
Each cell receives an initial value of sugar
equal to its capacity.
[Epstein.Axtell-1996-MIT] were not explicit about the initialization
of the sugar attribute of agents,
saying only that every agent is initialized with “some initial endowment”.
The value of the patch’s sugar is then set to its value of maxsugar.
Visualization of the Terrain
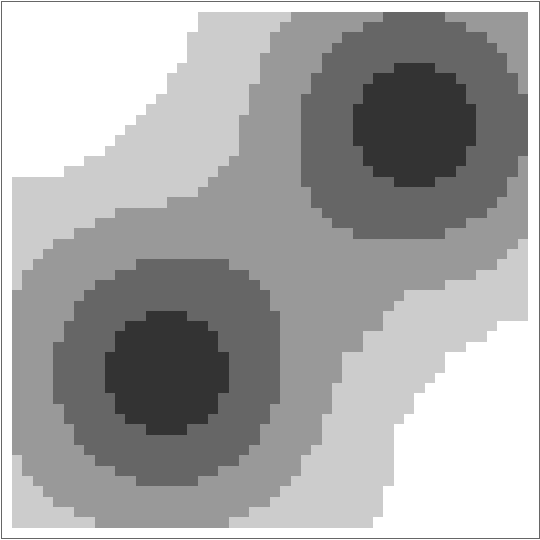
White = no sugar, darker gray = more sugar, possible levels (0, 1, 2, 3, 4)
- Environment visuals
the value of psugar is indicated by its color: darker gray implies more sugar.
Agents
Autonomous and Heterogeneous Agents
agents are “autonomous” in the following sense: they are not centrally governed
agents are heterogeneous in
initial location
immutable attributes (vision, metabolism, sex, maximum age)
mutable attributes (wealth, location)
Agents also have the capacity to accumulate sugar wealth w. An agent's sugar wealth is incremented at the end of each time-step by the sugar collected and decremented by the agent's metabolic rate. Two agents are not allowed to occupy the same patch in the grid. (Unique location constraint.)
Initialization of the Terrain
Visualization of the Terrain
Movement (Environment Topology)
There is at most one agent at each location of the terrain.
torus topology: location coordinates wrap around the edges
Model 1
Model 1: Distinguishing Features
Immediate growback: each tick, each patch restores psugar to max-psugar
Model 1: Setup
400 agents, each placed on random unoccupied patch (no dual occupancy)
each agent can only see a certain distance (vision, in [1,6]) horizontally and vertically
each agent has a certain sugar need (metabolism, in [1,4])
Schedule
At each tick, each agent will
move to the nearest unoccupied location within their vision range with the most sugar (their own patch is a candidate when moving)
collect all the available sugar there. If its current location has as much or more sugar than any unoccupied location it can see, it will stay put.
use (and thus lose) a certain amount (metabolism) of sugar each tick.
if an agent runs out of sugar, it dies and (in the first model) is simply removed from the simulation
Setup
- agents
age 0
randomly chosen unoccupied initial location,
random attributes (vision, metabolism, max-age, initial wealth w0)
random attribute values are drawn from uniform distributions with ranges specified below
Model Rules
- patch growback rule Gα:
each patch grows α units of sugar per time-step, up to the patch's capacity
- agent movement rule M:
move to nearest best unoccupied, visible patch (resolving ties randomly)
best = most sugar visible = with vision patches to the N, E, S, W (vNM neighborhood)
collect all sugar at new location, decrement sugar wealth by metabolism
if sugar wealth <= 0, die
- agent replacement rule R:
if an agent dies, it is replaced by a new agent
new agents get the same initializations as initial agents
Scheduling of events
Scheduling is determined by the order in which the different rules G, M and R are fired in the model. Environmental rule G comes first, followed by agent rule M (which is executed by all agents in random order) and finally agent rule R is executed (again, by all agents in random order).
Parameterisation
Epstein & Axtell (1996, pg. 33)
- Growth rate α
1
- Number of agents N
250
- Agents' initial wealth w0
distribution U[5,25]
- Agents' metabolic rate m distribution
U[1,4]
- Agents' vision v distribution
U[1,6]
- Agents' maximum age max-age
distribution U[60,100]
Initialization
set sugar level of each patch to its sugar capacity
create n-agents agents at a random unoccupied initial locations
initialize agents
Sugarscape as a Time-Homogeneous Markov Chain
Sugarscape “induces” a THMC:
state of the system as a 50×50 array
each array element corresponds to one patch
patch state now becomes
the patch's sugar level
whether the patch is occupied
occupying agent's state (e.g., vision, metabolic rate, wealth and life expectancy)
the number of possible states is finite since all the state variables can only take a finite set of values.
the state implies a probability distribution over the state space for the following time-step
Analysis
- irreducible THMC:
it is possible to go from any state i to any other state j in finite time
Izquierdo, Izquierdo, Galán and Santos (2009)
“the state space of the induced THMC described in the previous section is irreducible and aperiodic (also called ergodic)”
IIGS (2009)
Regenerating States
- regenerating states:
states where agents stay stationary and no sugar is collected.
Example:
every agent has vision v = 1
all agents are placed on interior desert patch
Agents do not move because the only unoccupied patches they can see have no sugar, and no sugar is collected for the same reason.
A regenerating state can produce a regenerating state: place any newborn in one of dessert patches.
Pristine State
If a regenerating state is produced four times in a row (AE's maximum sugar capacity is 4), the environment returns to its initial state: each patch's sugar level is equal to its capacity
IIGS define any such state to be a “pristine state” each patch's sugar level is equal to its capacity.
define exterminating pristine states: pristine states where
every agent dies (because every agent's sugar wealth w is no greater than its metabolic rate m).
Possible States
A state is possible if we can indentify a sequence of events that can lead to it, each with strictly positive probability.
- THMC is irreducible
i.e. it is possible to go from any state i to any state j in a finite number of time-steps.
THMC is irreducible (proof)
The proof rests on the following facts:
Let us call initial states those states that can be generated at the begginning of the simulation.
Given our definition of the state space, any state j can be reached by running the model from some initial state j0.
Any initial state j0 is reachable from any exterminating pristine state in one time-step.
To achieve this (departing from the exterminating pristine state) one only has to create the population of newborns as in state j0.
Any state i can lead to an exterminating pristine state, i.e. for every state i there exists an exterminating state ext-prist-st such that p(ni)i,ext-prist-st > 0 for some ni.
Note that one can reach a regenerating state from any state i by giving every newborn vision v = 1 and placing it in any of the patches coloured in red in figure 2.
(Note that sooner or later every agent must die because the maximum age max-age is 100.)
Reaching an exterminating pristine state from a regenerating state is straightforward: one only has to organise a synchronised genocide by "growing" agents with the desired life span –something that can be done by appropriately setting the newborns' metabolic rate m and initial wealth w0 (and vision v = 1).
A newborn with vision v = 1, metabolic rate m and initial wealth w0 placed on one of the patches painted in red in figure 2 will live Ceiling[w0/m] time-steps.
Since this procedure allows us to "grow" agents with life spans whose greatest common divisor is 1, it is possible (Bézout's identity) to organise a synchronised genocide from any regenerating state.
Having proved that the THMC is irreducible, it only remains to prove that it is also aperiodic.
To prove this it suffices to find an aperiodic state –as indicated in section 8 of our paper, after definition 7–.
Note that any exterminating pristine state ext-prist-st is clearly aperiodic, since the greatest common divisor of the set of integers n such that p(n)ext-prist-st,ext-prist-st > 0 is 1, as explained in the third bullet point of the previous list.
This concludes the proof that the induced THMC is irreducible and aperiodic, i.e. ergodic.
Ergodic THMC
In ergodic THMCs, the LR probability of finding the system in each of its states in the long run is
strictly positive
independent of the initial conditions
and the limiting distribution π coincides with the occupancy distribution π* (the long-run fraction of time that the system spends in each state).
Hence, the limiting distribution of any statistic (e.g. the sugar wealth distribution) coincides with its occupancy distribution too, and does not depend on the initial conditions.
Thus, we could approximate the limiting distribution of emergent wealth distributions in Sugarscape as much as we like by running just one simulation (with any initial conditions) for long enough.
Further Reading
Some Notable Sugarscape Extensions
- norm formation through cultural diffusion
- emergence of communication and cooperation in artificial societies
A websearch will turn up many Sugarscape implementations in many programming languages and simulation toolkits. Of particular interest are the following: the NetLogo implementations in the NetLogo Models library, the Mathematica implementation in chapter 14 of [Kendrick.Mercado.Amman-2006-PrincetonUP], and the very complete Python implementation in [KremerHerman.Gupta-2024_GuisadoLizar.etal]. In a somewhat technical paper, [Kehoe-2016-arXiv] works toward exact replicability by providing a formal specification of Sugarscape model.
References
Buzing, P. and A. Eiben and M. Schut (2005) Emerging Communication and Cooperation in Evolving Agent Societies. Journal of Artificial Societies and Social Simulation 8(1)2. http://jasss.soc.surrey.ac.uk/8/1/2.html.
Epstein, J.M. (1999) Agent-Based Computational Models And Generative Social Science. Complexity 4(5), pp. 41-60.
Epstein, J. M. and Robert L. Axtell (1996) Growing Artificial Societies: Social Science from the Bottom Up. The MIT Press.
Flentge, F. and D. Polani and T. Uthmann (2001) Modelling the Emergence of Possession Norms Using Memes Journal of Artificial Societies and Social Simulation 4(4)3. http://jasss.soc.surrey.ac.uk/4/4/3.html.
Izquierdo, Luis R. and Segismundo S. Izquierdo, José Manuel Galán and José Ignacio Santos (2009) Techniques to Understand Computer Simulations: Markov Chain Analysis Journal of Artificial Societies and Social Simulation 12(1)6. http://jasss.soc.surrey.ac.uk/12/1/6.html and especially the appendix http://jasss.soc.surrey.ac.uk/12/1/6/appendixB/EpsteinAxtell1996.html#epstein1996
Buzing, P., A. Eiben, and M. Schut. (2005) Emerging Communication and Cooperation in Evolving Agent Societies. Journal of Artificial Societies and Social Simulation 8, Article 2. http://jasss.soc.surrey.ac.uk/8/1/2.html
Epstein, Joshua M. (1999) Agent-Based Computational Models and Generative Social Science. Complexity 4, 41--60.
Epstein, Joshua M., and Robert L. Axtell. (1996) Growing Artificial Societies: Social Science from the Bottom Up. Washington, DC and Cambridge, MA: Brookings Institution Press and MIT Press.
Flentge, F., D. Polani, and T. Uthmann. (2001) Modelling the Emergence of Possession Norms Using Memes. Journal of Artificial Societies and Social Simulation 4, Article 3. http://jasss.soc.surrey.ac.uk/4/4/3.html
Izquierdo, Luis R., and Segismundo S. Izquierdo. (2009) Techniques to Understand Computer Simulations: Markov Chain Analysis. Journal of Artificial Societies and Social Simulation 12, 6. http://jasss.soc.surrey.ac.uk/12/1/6.html
Kehoe, Joseph. (2016) The Specification of Sugarscape. https://arxiv.org/abs/1505.06012
Kendrick, David A., P. Ruben Mercado, and Hans M. Amman. (2006) Computational Economics. : Princeton University Press. http://www.jstor.org/stable/j.ctvcm4g94
Kremer-Herman, Nathaniel, and Ankur Gupta. (2024) "Replacing Sugarscape: A Comprehensive, Expansive, and Transparent Reimplementation". In Guisado-Lizar, Jose-Luis and Riscos-Nu~nez, Agustin and Moron-Fernandez, Maria-Jose and Wainer, Gabriel (Eds.) Simulation Tools and Techniques, Cham: Springer Nature Switzerland.